|
|
|
Shaoping
Bai |
| Title: |
Professor, Ph.D. |
| |
Dept.
Materials and Production &
Centre for Robotics Research
Aalborg University, DenmarkFounder of
BioX ApS, Denmark |
| Address: |
Pon. 103, Rm 2.105 |
| Phone: |
+45 9940 9291(o); +45 2136 9697 (m) |
| E-mail: |
shb@mp.aau.dk |
|
|
|
| |
|
PhD scholarship in assistive
robotics immidiately available
We are looking for a candidate to work on a new project for the
development of exoskeletons that will assist elderly persons in
enhancing their mobility and manipulability. The candidate will get
involved in design and development of upper arm exoskeletons, with
focus on the user-motion intention detection and robot control.
The candidate should have a MSc degree in control
engineering, mechatronics or robotics with relevant background for
robotic or assistive system development. Strong competencies in
dynamics and robotics, and skills of simulation in MATLAB and
programming in C/C++ are essential. Experience in one or more of the
following areas will be considered an asset:
- Design and control of exoskeleton systems
- motion intention detection and control
- human/robot interaction
The scholarship is immediately available. The successful
candidate will be offered a three-year scholarship of phd study at
AAU. Applications, including cv and transcripts, should be sent to prof. Shaoping Bai of Department of Mechanical and
Manufacturing Engineering, AAU, at
shb@mp.aau.dk.
|
|
|
Research Interests
- Robotics: humanoid, mobile robots, surgical robots, calibration
- Robot design: robotic arms, robotic wrists, parallel manipulators
- Linkage synthesis/analysis, computer-aided design
- Modelling, simulation and reliability analysis of wind
turbine transmissions
Research projects
- Robotics and Wearable Exoskeleton Technology
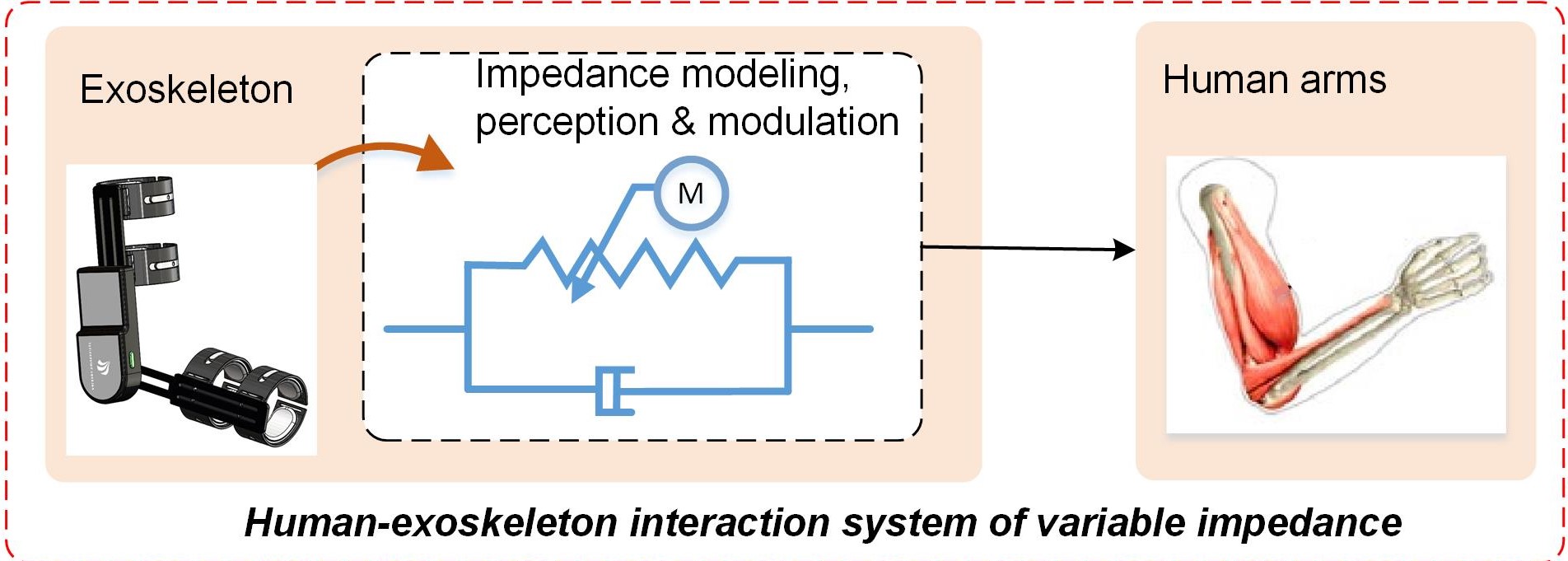 |
VIEXO (2022-2025)
The project is funded by Independant Research Fund Denmark, with an aim to develop a new generation of industrial exoskeletons. The reserach focus in on the variable impedance modeling, perceiption, and control.
Collaborators: National University of Singapore, Exoskeletter ApS

|
|
 |
ALEXO
(2019-2022)
A three
year project to empower people with walking difficulties
with an advanced intelligent lower-body exoskeleton.
The objective is to develop
and test an effective,
safe and affordable leg exoskeleton to assist people who
have walking problems.
Collaborator: Aalborg
University Hosipital
Funded by
Nyegaardsfond
|
 |
EXO-AIDER
EXO-AIDER, aka
E-joint, is a Grand Solutions project funded by
Innovation Fund Denmark, running from 2017 to 2021.
website:
www.exo-aider.dk

|

|
AXO-SUIT: exoskeletons suitable for elderly
persons A three year project stated on October 1st 2014
and is funded under the
EU Ambient Assisted
Living (AAL) Joint Programme, Call 6
The project was completed with great success. EU AAL
selected AXO-SUIT at the project of the month in 2020.
https://www.aal-europe.eu/project-of-the-month-axo-suit/
Funding bodies

website:
www.axo-suit.eu |
|

An arm exoskeleton produced by 3D
printing |
Exoskeleton for upper extremity
assistance A project within the SPIR platform project
Patient@home,
the largest research project in welfare technology in
Denmark funded by
Danish Agency for Science Technology and Innovation
 |
|
|

|
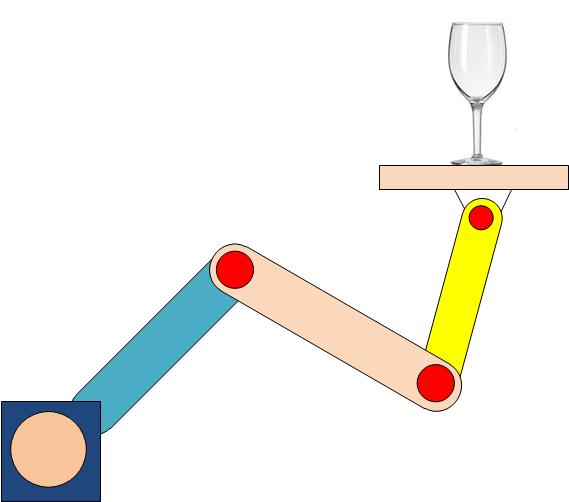
A novel 3-dof robot for
Schoenflies motion generation
The robot is able to generate Schoenfilies motion, i.e.
a special group of motion containing three translations
and one rotation, similar to the motion of a waiter
carrying glasses. The new type of robots is well suited
for PnP operations in food and pharmaceutical industries.
The project is founded by: RoboCluster and AAU
First version has been
developed by a group of MP6 students in the Spring 2013,
while the electronics and motion controller were built
by a group of MP5 students.
video (1) animation
of the PnP motion (click
here)
Video (2) robot
assembly (click
here)
Video (3)
pick-and-place demo, 1st prototype (click
here)
Video (4) demo by
2nd prototype (click
here)
|

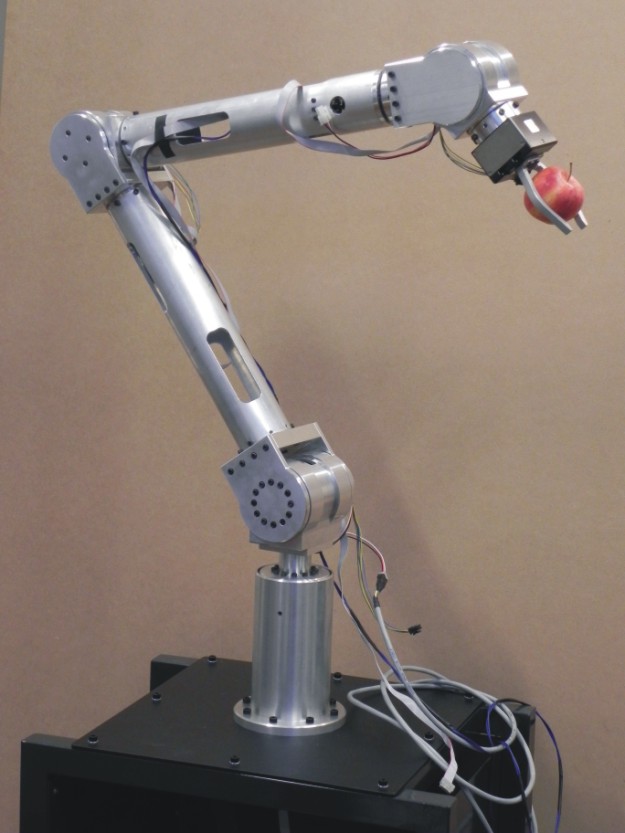
the AALARM (AAU
Lightweight
Arm)
click to view a
large pics |
A light-weight robotic arm for assistive
applications.
Research student: Lelai Zhou (PhD) The project is funded by
 
video (1):
http://www.youtube.com/watch?v=L9ziUlLxzwE (the
first prototype built by L. Zhou)
(2)
http://www.youtube.com/watch?v=yLPBrK_sjjI (robot
for drink serving, developed by MP6 students in 2012
Spring)
(3)
http://www.youtube.com/watch?v=zLsp5iLmIG8
(robot for drink serving ver 2.developed by MP3 students
2012 Automn) |
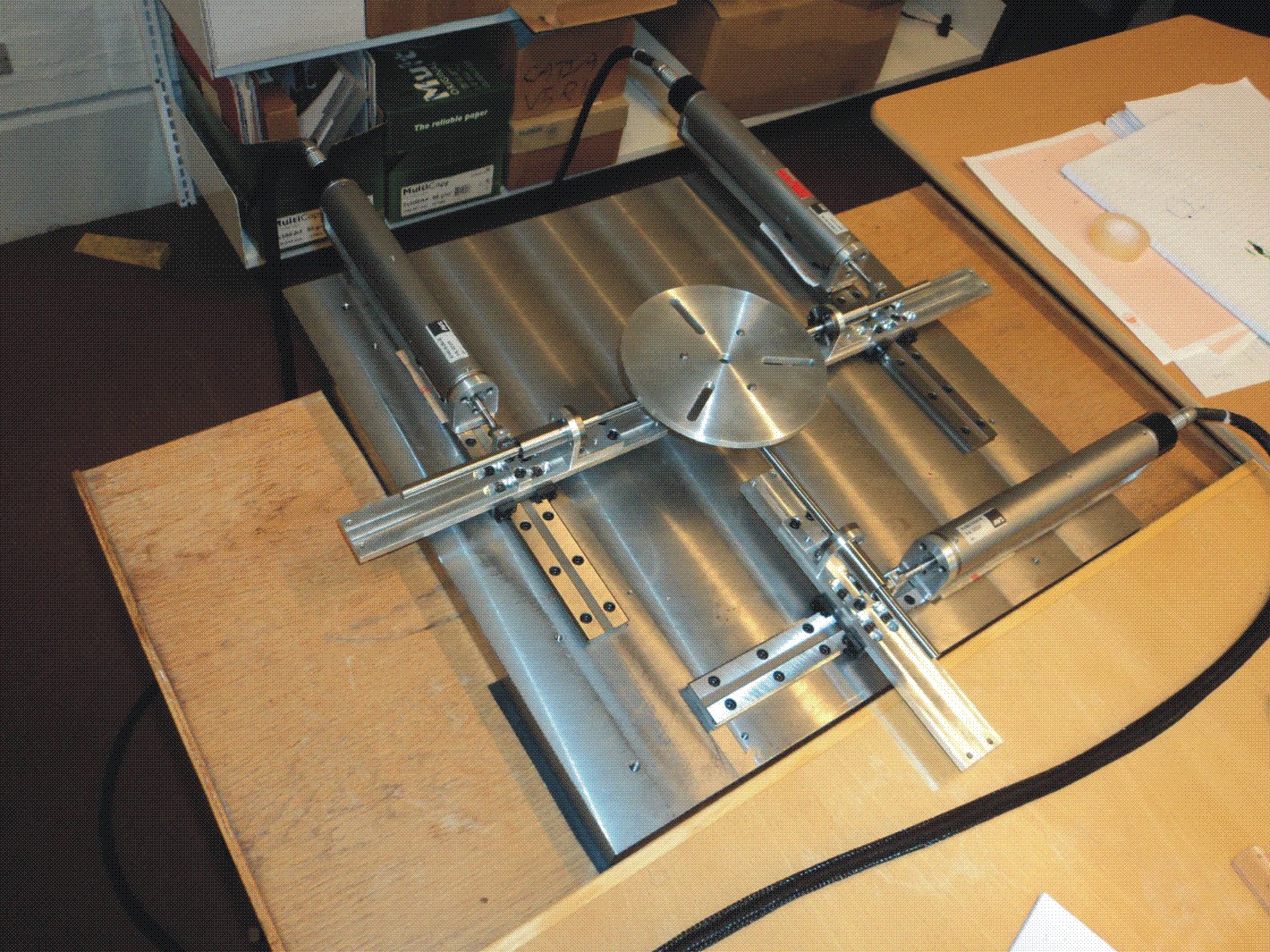
The 3-PPR manipulator is driven with three
high-precision self-sensing SMAC actuators.
Click here for a video
clip |
Multi-objective optimization of spherical parallel
manipulators
PhD student: Guanglei Wu Collaborator: Dr. Stephane Caro, IRCCyN,
France |
 |
A Robust Method of Dimensional
Synthesis of Linkages and it Industrial Applications |
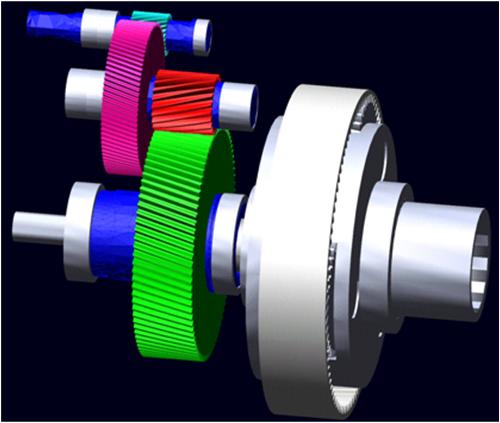 |
Dynamic modeling and reliability analysis of a wind
turbine gearbox Research students:
Esben Aldal and Rudi Olesen, (MSc,
graduated in june 2010)
Younes AIT DAOUI, Exchanging student from ECN, France
Luis Fernando Garcia (MSc, graduated in June 2012) |
|
| |
|
Selected publications
- S. Bai, Z. Li, J. Angeles, Exact Path Synthesis of RCCC linkages for a Maximum of Nine Prescribed Positions, J. Mechanisms and Robotics
, 2022, 14(2): 021011 [download
pdf]
- S. Bai, A note on the univariate nonic derived from the coupler curve of four-bar linkages, Mechanism and Machine
Theory, 118: 139-153[download
Maple file]
- X. Wu, Z. Xie, J. A. Kepler, S. Bai, A
parametric model of 3-PPR planar parallel manipulators for
optimum shape design of platforms, Mechanism and Machine
Theory, 118: 139-153[download
pdf]
- S. Bai, 2017, Geometric analysis of
coupler-link mobility and circuits for planar four-bar linkages,
Mechanism and Machine Theory, 2017, 118:3–64 [download
pdf ]
- K.
Xu, L, Li, S. Bai, Q. Yang, X. Ding, 2017, Design and analysis
of a metamorphic mechanism cell for multistage orderly
deployable/retractable mechanism, Mech. and Mach.
Theory, 111:85-98 [download
pdf]
- L. Zhou, S. Bai, and Y. Li. Energy Optimal
Trajectories in Human Arm Motion Aiming for Assistive Robots.
Modeling, Identification and Control, 38(1):11–19,
2017 [download
pdf]
- S. Bai, D. Wang and H. Dong,
2016, A Unified Formulation for Dimensional Synthesis of
Stephenson Linkages, Journal of Mechanism and Robotics,
2016, Vol. 8 #041009-1.[download
pdf]
- S. Bai, and J. Angeles, 2015,
Coupler-curve synthesis of four-bar linkages via a novel
formulation, Mechanism and Machine Theory, Vol. 94, pp.
177-187 [download
pdf]
- M. Lyu, W. Chen, X. Ding, J.
Wang, and S. Bai, and H. Ren, 2016, Design of a biologically
inspired lower limb exoskeleton for human gait rehabilitation,
Review of Scientific Instruments, 87, 104301 (2016),
DOI:http://dx.doi.org/10.1063/1.4964136
-
L. Zhou, Y. Li, S. Bai, 2017, A Human-Centered Design
Optimization Approach for Robotic Exoskeletons through
Biomechanical Simulation, Robotics and Autonomous Systems,[download
pdf]
- G. Wu, S. Bai, P. Hjørnet, 2016, Architecture
Optimization of a Parallel Schönflies-motion Robot for
Pick-and-place Applications in a Predefined Workspace, Mechanisms and Machine Theory, doi:
10.1016/j.mechmachtheory.2016.09.005, pp. 148-165 [download
pdf]
- G. Wu, S. Bai, and J. Kepler,2015, Stiffness
characterization of a 3-PPR planar parallel manipulator with
actuation compliance, Proc. IMech, Part C: J. Mechanical
Engineering Science 2015 229: 2291-2302 [pdf]
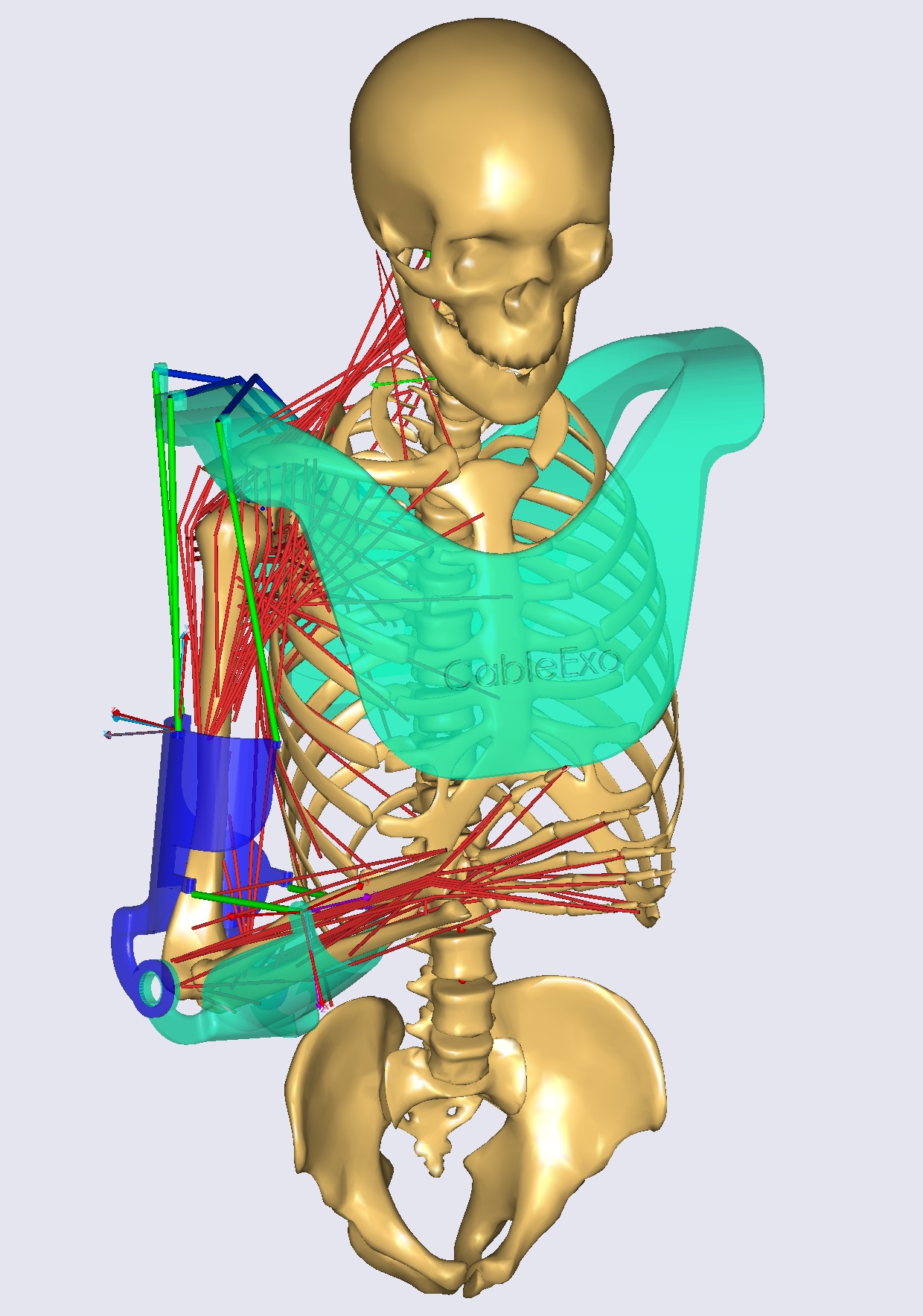
- L. Zhou, S. Bai, M. S. Andersen and J.
Rasmussen, 2015, “Modeling and Design of a Spring-loaded,
Cable-driven, Wearable Exoskeleton for the Upper Extremity”,
Modeling, Identification and Control, 36(3), pp. 167-177 [download
pdf]
- S. Bai and J. Angeles, 2015, Synthesis of
RCCC linkages to visit four given poses, J. of Mechanisms and
Robotics, 7(3), #031004, doi:10.1115/1.4028637 [download
pdf]
-
L. O'Sullivan,
V. Power, G. Virk, N. Masud, U. Haider, S. Christensen, S. Bai,
L. Cuypers, M. D’Havé, K.Vonck, 2015, End User Needs Elicitation
for a Full-body Exoskeleton to Assist the Elderly, Procedia
Manufacturing, Vol. 3, 2015, 1403-1409 [download
pdf]
- L. Zhou and S. Bai, 2015, A new approach to
design of a lightweight anthropomorphic arm for service
applications, doi:10.1115/1.4028292 J. of Mechanisms and
Robotics, 7(3), #031001[download
pdf]
- X. Wu, W. Chen, S. Bai, et
al. 2015, Image processing assisted
locomotion observation of cockroach Blaptica Dubia,
Trans. of the Institute of Measurement and Control
doi:0142331214543299, Vol. 37(4) 522–535 [download
pdf]
- G
Wu,
S
Caro,
S
Bai,
JA
Kepler,
2014,
Stiffness
Analysis
and
Optimization
of a
Co-axial
Spherical
Parallel
Manipulator,
Robotics
and
Autonomous
Systems,
vol
62.1377-1386[download
pdf]
- Wu, G., Bai, S. and Kepler, J. A., 2014, Mobile Platform Center Shift in Spherical Parallel Manipulators with Flexible Limbs,
Mechanism and Machine Theory. Vol.75, p. 12-26[download
pdf]
- Chen, W., Jiang, J., Liu, J.,
Bai, S., Chen, W.,
A passive eddy current damper for vibration suppression of a force sensor.
Journal of Physics D: Applied Physics, Vol. 46, No. 7, 2013, p. 1-11[download pdf].
-
Bai, S.
Shape Modeling of Continuous-Curvature
Continuum Robots, In Proc. of 6th
International Workshop on Computational Kinematics 2013
(CK2013). 2013[download
pdf]
- Bai S., Xing C.C.
2012. Shape Modeling of a Concentric-tube
Continuum Robot. In Proc. 2012 IEEE
International Conference on Robotics and
Biomimetics (ROBIO 2012), Dec, 11-14, 2012,
Guangzhou, China . pp. 116-121.
-
Wu, G., Bai, S., Kepler, J.A.,
and Caro, S., 2012, Error Modeling and Experimental Validation
of a Planar 3-PPR Parallel Manipulator With Joint Clearances,
ASME J. Mechanisms and Robotics, 4(4), pp. 041008-1–041008-12 [download
pdf].
-
S. Bai and J. Angeles, 2012,
A
Robust Solution of the Spatial Burmester Problem, J.
Mechanisms Robotics, 4, 031003 [download
pdf]
-
L. Zhou, S. Bai and M.R. Hansen, 2012,
Integrated Dimensional and Drive-Train Design Optimization of a
Light-Weight Anthropomorphic Arm.
Robotics and Autonomous Systems,
60(1), pages. 113-122
[download
pdf]
-
L. Zhou, S. Bai and M.R. Hansen, 2011.
Drive train design and optimization of a 5-DOF light-weight
robotic arm, Mechatronics,
21(3), Pages 560-569 [download
pdf]
-
S. Bai and J. Rasmussen, Modelling of
Physical Human-Robot Interaction for Exoskeleton Designs, ECCOMAS Thematic Conference: Multibody Dynamics 2011, July 4-7,
2011, Brussels, Belgium, (download
pdf).
-
S. Bai and S. Caro, A Nonlinear Motor-Gear
Model and its Application to Share-loading Analysis of Wind
Turbine Yawing Mechanisms, ECCOMAS Thematic Conference: Multibody Dynamics 2011, Brussels, Belgium.
-
J. Angeles and S. Bai, A Robust Solution of
the Spherical Burmester Problem, in proc. ASME International
Design Engineering Technical Conferences (IDETC) , August
15-18, 2010, Montréal, #DETC-28189
-
Binaud, N., Caro, S., Bai, S.,
Wenger, P. Comparison of 3-PPR Parallel Planar Manipulators
Based on Their Sensitivity to Joint Clearances, In proc. IEEE/RSJ Inter. Conf. on Intelligent RObots and
Systems (IROS), Taipei, October 18-22, 2010, pages
2778-2783
-
Bai, Shaoping, Optimum Design of Spherical
Parallel Manipulators for a Prescribed Workspace. Mechanism
and Machine Theory. 2010 ; 45(2) : 200-211 [download
pdf]
-
Bai, Shaoping, Hansen, Michael Rygaard,
Angeles, Jorge. A robust forward-displacement analysis of
spherical parallel robots. Mechanism and Machine Theory. 2009 ; 44(12), 2204-2216
[download pdf]
-
Bai, Shaoping ; Caro, Stephane, Design and
Analysis of a 3-PPR Planar Robot with U-shape Base. International Conference on Advanced Robotics (ICAR 2009),
2009
-
S. Bai, M.R.Hansen, and T.O.Andersen “Modelling
of a special class of spherical parallel manipulators with Euler
parameters”, Robotica, 2009, 27(2): 161-164 [download
pdf]
-
C. Chao, S. Bai, and J. Angeles, “The
Synthesis of Dyads With One Prismatic Joint”, ASME Journal of
Mechanical Design, 2008, 130(3),
034501:1-6 [download
pdf]
-
S. Bai and J. Angeles, “A unified
input-output analysis of four-bar linkages”, Mechanism and
Machine Theory, vol. 43, pp.240-251, 2008
[download pdf]
-
S. Bai and M.R.Hansen, “Modelling of a
Spherical Robotic Wrist with Euler Parameters”, Proc.
The 12th World Congress in Mechanism and Machine Science (IFToMM
2007), June 17-21, Besancon, France
-
C.P. Teng, S. Bai, and J.
Angeles, 2007. “Shape synthesis in mechanical design”, Acta
Polytechnica, 47(6), pp. 56-62 [download
pdf]
-
S. Hernandez, S. Bai and J.
Angeles. "The Design of a Chain of Spherical Stephenson mechanisms
for a Gearless Robotic Pitch-Roll Wrist", ASME Journal of
Mechanical Design, Vol. 128, n2, pp. 422-429, 2006 [download
pdf]
-
J. Angeles, and S. Bai, “Some Special Cases of The Burmester
Problem For Four and Five Poses”, Proc. 2005 ASME Design
Engineering Technical Conferences(DETC’05), #MECH-84871 [download
pdf]
-
S. Bai and J. Angeles, “The Design of A Gearless Pitch-Roll
Wrist”, Proc. of IEEE Conference on Robotics and Automation (ICRA
2005), pp. 3224—3229, 2005
-
S. Bai and M. Y. Teo, “Kinematic Calibration and Pose
Measurement of a Medical Parallel Manipulator by Optical Position
Sensors", Journal of Robotic Systems, 20(4), pp. 201--209,
2003 [download pdf]
-
S. Bai and K. H. Low, “Path Generation of Walking Machines in
3D Terrain”, Proc. IEEE Conference on Robotics and Automation
(ICRA 2002), pp.2216-- 2221, Washington, 2002
-
S. Bai, K.H. Low, “Terrain Evaluation and its Application to
Path Planning for Walking Machines”, Advanced Robotics,
15(7), pp. 729--748, 2001.[download
pdf]
-
S. Bai and K.H. Low, “Body Trajectory Generation for Legged
Locomotion Systems Using A Terrain Evaluation Approach”, Proc.
IEEE International conference on Robotics and Automation (ICRA
2001), pp.2279--2284, Seoul, Korea, 2001.
-
S.P. Bai, K.H. Low, and T. Zielinska, “Quadruped Free Gait
Generation Based on the Primary/Secondary gait”, Robotica,
Vol. 17, pp.405--412, 1999 [download
pdf]
|
|
{kind=link}